Generative engineering
AI generative design can explore thousands of design options in minutes. But some critical aspects of engineering still require structured knowledge and human judgment.
7 min reading
Harness design fails when complexity outpaces validation. This article breaks down how requirements, routing, and physical integration must be engineered as a single, rule-driven workflow—across industries.
Harness design rarely fails because engineers do not know how to connect components. It fails because complexity accumulates faster than decisions can be validated.
Across modern systems, electrical wiring harnesses must accommodate growing electrical content, tighter packaging, frequent late changes, and increasing variant pressure. What was once a downstream deliverable has become a system-level constraint: routing decisions impact mechanical integration, assembly feasibility, cost, serviceability, and platform reuse.
In this context, harness design is no longer about drawing wires. It is about managing constraints early, when architectural choices still matter. Decisions taken at the requirement and routing stages directly determine whether a harness can be integrated without clashes, excessive rework, or uncontrolled proliferation of variants.
At Dessia, harness design is treated as a structured, rule-driven generative engineering workflow, starting from system requirements and extending through routing, architecture definition, and physical integration. This continuity is what allows harness engineering to scale in industrial environments.
Harness design challenges are often discussed through an automotive lens, but the underlying problem is fundamentally multi-industry.
Wherever electrical, electronic, or hybrid systems must be physically integrated into constrained environments, harness design becomes a system-level engineering issue—not a drafting task.
This applies across a wide range of industries, including:
Across these domains, the symptoms are remarkably consistent:
The conclusion is universal: harness design complexity scales faster than manual validation workflows.
This is why harness design must be treated as a rule-driven, architecture-level engineering problem, regardless of industry. The principles of requirement formalization, constraint-driven routing, and continuous integration validation apply equally—whether designing a vehicle platform, an aircraft system, a satellite payload, or an industrial installation.
Many harness integration problems do not appear during routing—they originate upstream, in loosely defined or implicit requirements.
Harness design requirements go far beyond connectivity. They define how the harness is allowed to exist within the system, and they govern every downstream decision.
Typical requirement gaps engineers face include:
In practice, harness requirements must encode multiple constraint layers:
Dessia formalizes these requirements as explicit, computable engineering rules. This step is critical: it transforms constraints from assumptions into enforceable design logic, reducing late-stage surprises and enabling automated consistency checks downstream.
Once requirements are defined, architects & designers must translate functional intent into a connection plan. This is where ambiguity often enters the process.
A connection plan is not just a list of links—it defines the logical architecture of the harness:
In traditional workflows, connection plans are often static artifacts that drift away from routing reality as changes accumulate.
Dessia treats the connection plan as an active engineering object. It directly drives routing logic and remains synchronized with physical integration. As architectures evolve, the connection plan evolves with them, preserving traceability between system intent and physical implementation.
Routing is where theoretical decisions meet physical reality—and where many projects slow down.
Engineers must route harnesses through increasingly constrained environments while respecting:
Routing is not a geometric optimization problem alone. It is a multi-constraint convergence problem. Local optimizations often lead to global integration issues: inaccessible fixations, excessive lengths, or late clashes with mechanical components.
By embedding routing constraints directly into the design logic, Dessia enables consistent, rule-compliant routing path generation. Routing decisions remain aligned with upstream requirements, even as designs evolve and constraints tighten.
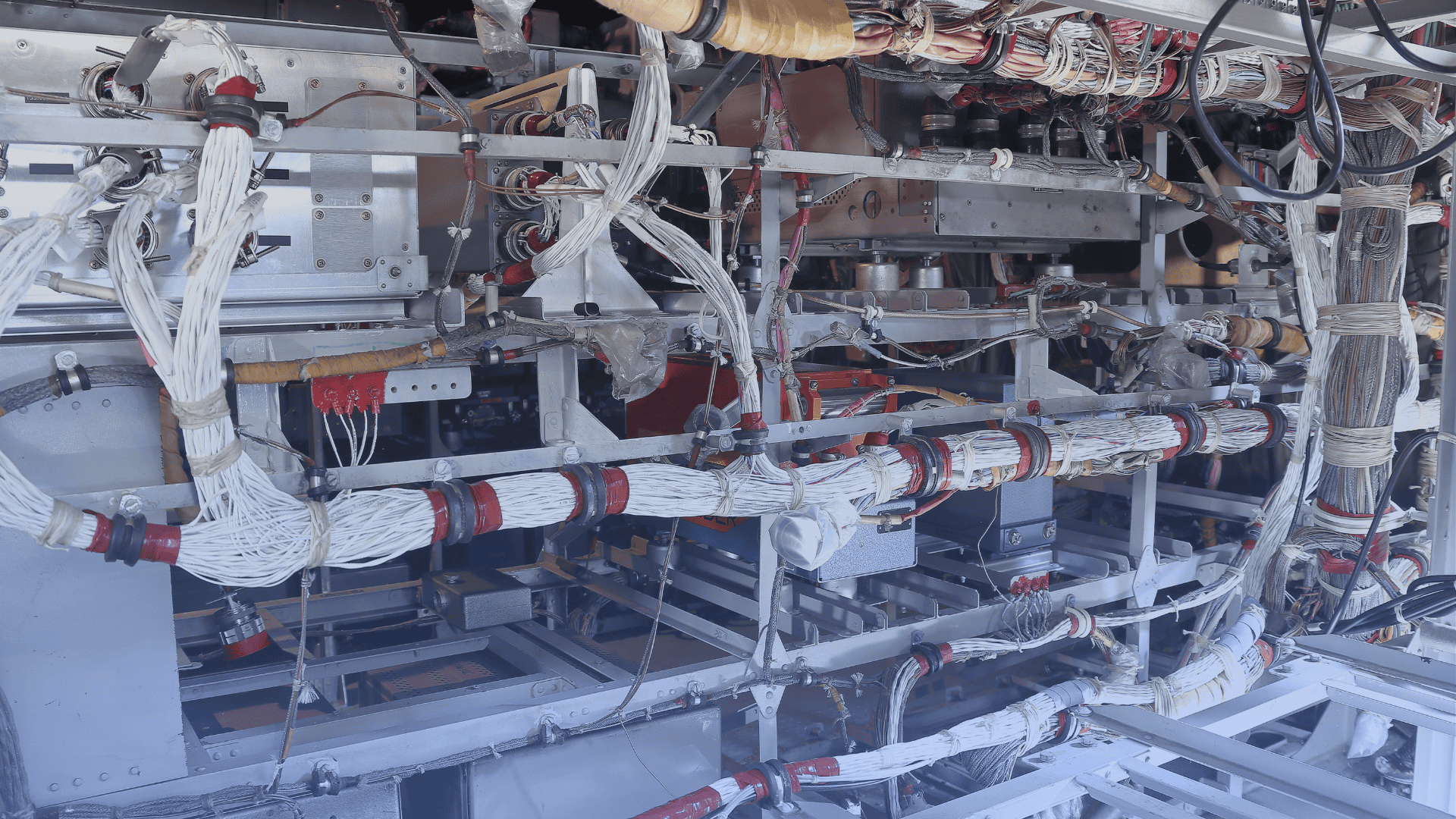
Physical integration is often treated as a validation step. In reality, it is where architectural weaknesses are exposed.
Harnesses must coexist with structural elements, thermal systems, and mechanical assemblies—often in zones with minimal tolerance for error. Late integration issues typically result in:
Dessia addresses physical integration as a continuous engineering concern, not a final check.
Focus areas include:
Maintaining continuity between requirements, routing, and integration avoids the fragmentation that makes harnesses difficult to scale and reuse.
Manual harness design workflows scale poorly when:
Relying on individual expertise and late validation leads to inconsistent decisions and fragile architectures.
A rule-driven, architecture-centric approach allows teams to:
This is where Dessia positions its harness design capabilities: structuring engineering decisions, not just producing geometry.
Harnesses are no longer passive carriers of electricity. They are architectural elements that influence cost, integration effort, manufacturability, and long-term maintainability.
Treating harness design as a disciplined, rule-based engineering process, starting from requirements and extending through routing and physical integration, is essential to scale complex systems.
By unifying requirements definition, connection logic, routing generation, and physical integration within a single engineering framework, Dessia enables teams to industrialize harness design with consistency, control, and confidence.
Harness design is not just about connecting components.It is about engineering architectures that survive complexity.
Published on
11.02.2026
These articles may be of interest to you
Generative engineering
AI generative design can explore thousands of design options in minutes. But some critical aspects of engineering still require structured knowledge and human judgment.
7 min reading
Generative engineering
Harness design fails when complexity outpaces validation. This article breaks down how requirements, routing, and physical integration must be engineered as a single, rule-driven workflow—across industries.
8 min reading
Generative engineering
Digital transformation isn’t the endgame — it’s the beginning. Discover how Generative AI and Dessia’s explainable platform are shaping the next era of continuous, intelligent engineering.
6 min reading